Le première idée qui me vient c'est une question ArduPilot ou PX4 ?
ChatGTP:
ArduPilot est une plate-forme de pilotage automatique open-source qui prend en charge une large gamme de drones, y compris les multirotors, les avions, les hélicoptères et les véhicules terrestres. Il est écrit en langage C++
PX4 est également une plate-forme de pilotage automatique open-source populaire utilisée pour les drones. Il est écrit en C++ et se concentre sur la modularité et la réutilisabilité du code. PX4 est connu pour sa stabilité et sa précision, et il est utilisé dans une variété de drones commerciaux et industriels. Il offre également des fonctionnalités avancées telles que la planification de trajectoires, la vision par ordinateur, etc.
Pour faire un choix :
- Type de drone : ArduPilot est souvent utilisé pour les drones DIY (Do It Yourself) et les projets amateurs, tandis que PX4 est plus couramment utilisé pour les drones commerciaux et industriels.
- Fonctionnalités requises : Évaluez les fonctionnalités spécifiques dont vous avez besoin pour votre projet et vérifiez si ArduPilot ou PX4 répondent à ces exigences.
- Communauté et documentation : Vérifiez la taille et la qualité de la communauté de développeurs et la documentation disponible pour chaque plate-forme. Une communauté active et une documentation détaillée peuvent être utiles lorsque vous avez des questions ou des problèmes.
- Expérience de programmation : Si vous avez déjà de l'expérience en programmation en langage C++, vous pourriez trouver plus facile de travailler avec l'une ou l'autre des plates-formes.
Voilà ...
Maintenant voici tous les véhicules que l'on peut programmer avec PX4 :
PX4 - airframes reference.html
C'est impressionnant...
Les capteurs :
Le système nécessite au minimum un gyroscope, un accéléromètre, un magnétomètre (boussole) et un baromètre. Un GPS ou un autre système de positionnement est nécessaire pour activer tous les modes automatiques et certains modes assistés. Les véhicules à voilure fixe et VTOL doivent également inclure un capteur de vitesse (très fortement recommandé).
Le Hardware
PX4 est designé pour s'exécuter sur Pixhawk Series.
Sortie: Moteurs, Servos contrôles, Actuators ...
QGroundControl
Pour flasher le PX4 runs on Windows, Android, MacOS ou Linux.
https://docs.qgroundcontrol.com/master/en/getting_started/download_and_install.html
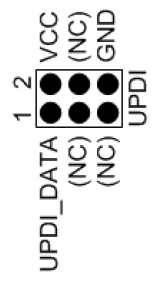
Je me lance j'installe, c'est complexe avec plein de Drivers.ArduPilot Ports
Simulation
https://docs.px4.io/main/en/simulation/
Les simulateurs permettent au code de vol PX4 de contrôler un véhicule modélisé par ordinateur dans un "monde" simulé. Vous pouvez interagir avec ce véhicule comme vous le feriez avec un vrai véhicule, en utilisant QGroundControl, une API externe ou une radiocommande/manette de jeu.
Perso je me laisserais tenté par :
AirSim construit le moteur Unreal, je me souviens de Unreal Tournament quel pied ce jeux, ah les moteurs 3D...
Gazebo : windows not supported.

Je sais pas vous mais moi ce schéma me fait tripper. Je verrais bien un simulateur AirSim derrière tout ça :
https://github.com/Microsoft/AirSim/releases
https://microsoft.github.io/AirSim/px4_setup/
On s'approche